RobotGEII 16-17 : Différence entre versions
m (Bjacquot a déplacé la page RobotGEII vers RobotGEII 16-17 sans laisser de redirection) |
(→{{Rouge|Présentation}}) |
||
| Ligne 10 : | Ligne 10 : | ||
Ce projet consiste à réaliser un robot pour participer à la coupe de robotique des GEII. Pour fabriquer ce robot nous devons respecter un cahier des charges défini par le [http://www.gesi.asso.fr/coupe_robotique_des_iut/images/2014/reglement_Vierzon_2014_V002.pdf règlement]. Le principe de ce concours est d'aller le plus rapidement possible d'un coin à l'autre d'une arène carrée de 8 mètres de coté, tout en esquivant les obstacles jonchant le parcours et les autres robots. Une fois arrivé, le robot doit percer un ballon qui lui est attaché en début de course. | Ce projet consiste à réaliser un robot pour participer à la coupe de robotique des GEII. Pour fabriquer ce robot nous devons respecter un cahier des charges défini par le [http://www.gesi.asso.fr/coupe_robotique_des_iut/images/2014/reglement_Vierzon_2014_V002.pdf règlement]. Le principe de ce concours est d'aller le plus rapidement possible d'un coin à l'autre d'une arène carrée de 8 mètres de coté, tout en esquivant les obstacles jonchant le parcours et les autres robots. Une fois arrivé, le robot doit percer un ballon qui lui est attaché en début de course. | ||
| − | =={{ | + | =={{Vert|Cahier des charges fonctionnel}}== |
Schéma fonctionnel de degré II | Schéma fonctionnel de degré II | ||
Version du 17 janvier 2018 à 17:52
Sommaire
- 1 Présentation
- 2 Etude et Réalisation des Differentes Parties
- 2.1 Alimentation et Régulation
- 2.2 Contrôle des moteurs CC par un dual H-Bridge (L298P)
- 2.3 Positionnement du robot: Explication du principe
- 2.4 Estimation de la position du robot
- 2.5 Detection d'obstacles
- 2.6 Caméra
- 2.7 Mise à l’arrêt du robot et le perçage du ballon
- 2.8 Réalisation Carte des "Entrées et Sorties" et du Pont H
- 3 Code complet
- 4 Vidéo de Démonstration
- 5 Bibliographie/références
Présentation
Présentation du projet
Ce projet consiste à réaliser un robot pour participer à la coupe de robotique des GEII. Pour fabriquer ce robot nous devons respecter un cahier des charges défini par le règlement. Le principe de ce concours est d'aller le plus rapidement possible d'un coin à l'autre d'une arène carrée de 8 mètres de coté, tout en esquivant les obstacles jonchant le parcours et les autres robots. Une fois arrivé, le robot doit percer un ballon qui lui est attaché en début de course.
Cahier des charges fonctionnel
Schéma fonctionnel de degré II

Schéma fonctionnelle 1er degres


Solutions techniques
Pour fabriquer ce robot nous avions plusieurs choix pour procéder à l’évitement des obstacles, ainsi qu'au guidage vers la zone. Nous avons choisi pour guider le robot un système hybride composé de roues codeuses et d'une caméra CMUCam Pixy, spécialisée dans la reconnaissance d'objets. La roue codeuse permettra d'effectuer le début du parcours, et sera remplacée par la caméra, plus précise, une fois la distance de détection atteinte. L'évitement des obstacles sera assuré par trois capteurs infrarouges SHARP GP2Y0A21YK0F, permettant la détection d'objets jusqu'à 80 centimètres de distance, qui, placés à l'avant du robot, permettront l'esquive si un obstacle est rencontré.
Etude et Réalisation des Differentes Parties
Alimentation et Régulation
Batterie
La batterie est imposée :
| Tension | 12 V |
| Capacité | 7 Ah |

Moteurs de roues
Les moteurs sont imposés.
- Caracteristique du moteur:
| Marque | Dunkermotoren G 42*25 |
| Tension | 15V |
| In | 1.45 A |
| Ifm | 10.9A |
| Rpm | 3300 tr/mn |

- Tests en conditions réeles sur les moteurs montés sur le robot ( U=12V ) :
| Résistance électrique | 4 ohm |
| Courant à vide | 0.28 A |
| Courant en charge nominale robot | 0.7A |
| Courant en charge au démarage robot | 1.6A |
- Consommation maximum en courant pour les 2 moteurs du robot :
Imax = 2*1.6A = 3.2A
Régulation de la tension d'alimentation
- Les besoins :
Pour Arduino MEGA:
Caractéristiques techniques :
| Operating Voltage | 5V |
| Input Voltage (recommended) | 7-12V |
| Input Voltage (limit) | 6-20V |
| Total output current MAX | 800mA |
On constate qu'il est possible d'alimenter la carte Arduino MEGA directement avec la tension de la batterie ( 12.8V chargée).
Ce n'est toutefois pas recommandé, car le régulateur intégré dans l'Arduino chaufferait, ce qui pourrait endommager le microcontrôleur.
Solutions Alimentation Arduino MEGA:
- Tension d'alimentation inférieure à 12 V
- Tension régulé de 5V qu'on fait venir directement sur les pattes VCC d'Arduino:
Le courant maximum requis: 800mA
Pour les Moteurs de Roues :
- Tension maximum requise: 15V
- Courant maximum requis: 3.2A
- Utilisation d'un Convertisseur DC/DC
Nous avons utilisé une carte faite par des étudiants des années précédents.

Cette carte contient deux régulateurs à découpage:
- LM2596S fournit 5V ( 3A max )
- XL6009E1 qui fournit 12V ( 4A max )
Les régulateurs fournissent largement le nécessaire en tension et courant.
Pour le semestre suivant nous prévoyons à réaliser une autre carte d'alimentation, qui sera plus compacte.
Contrôle des moteurs CC par un dual H-Bridge (L298P)
Principe de fonctionnement d'un H-Bridge (PONT-H)
Le pont-H est une structure utilisée en électronique de puissance pour:
- controle moteurs
- convertisseurs et hacheurs
- onduleurs
- Principe: On active les commutateurs avec differents cominaisons pour obtenir le branchement voulu. Le courant va circuler dans un sens ou dans l'autre dans le moteur, ce qui va permettre d'inverser les sens de rotation du moteur. Avec le pont-H on peut également varier la vitesse en modulant la tension aux bornes du moteur.


Combinaisons de commutateurs possibles pour commander un moteur DC:
| Sens + | Fermer A et D |
| Sens - | Fermer B et C |
| Freinage magnétique | A et C / B et D |
| Arret libre | A,B,C,D ouverts |
| Autres combinaison | INTERDITES |
Le composant L298N
Nous allons utiliser pour notre robot le composant L298N (traversant) qui a le meme principe de fonctionement que celui en CMS (L298P).

Dans la figure suivante on peux voir le cablage du composant, les signaux de commande et les sorties d'alimentation MOTEUR. Dans le tableau nous avons les 4 modes possibles en actionant les entrées logique C et D ainsi que Venable (PWM) pour varier la tension d'alimentation des moteurs (0-12V).

Tests éffectués avec un SHIELD Arduino (L298P) (
Pour commander les moteurs nous allons utiliser le pont H L298P [ datasheet].

Le composant est ci-dessous:

Pour faire des tests nous avons utlisé le Motor Shield For Arduino. En connectant ce shield à l'arduino nous pouvons commander les deux moteurs (commande du sens et de la vitesse).

- PWM
Nous allons utiliser le shield en mode PWM, on placera donc les jumpers en conséquence.

- Borne du moteur
Nous avons deux bornes (bleues) pour connecter les moteurs CC. Les connecteurs mâles derrière sont identiques à celui des bornes bleues.

- PWRIN
Les moteurs peuvent être alimentés par une alimentation externe lorsque le courant du moteur dépasse les limites fournies par l'Arduino (Il est conseillé de séparer les alimentations d’Arduino et des moteurs). Le changement entre la puissance externe et l'Arduino est mis en œuvre par deux jumpers .
PWRIN: Alimentation externe.
VIN: Alimentation du Arduino.
On placera donc les jumpers d’alimentation sur PWRIN.

On doit avoir quelque chose comme cela:

- Signal de contrôle Tableau de vérité
| E1 | M1 | E2 | M2 | Texte de l’en-tête | |
|---|---|---|---|---|---|
| L | X | Moteur 1 désactivé | L | X | Moteur 2 désactivé |
| H | H | Moteur 1 en arrière | H | H | Moteur 2 en arrière |
| H | L | Moteur 1 en avant | H | L | Moteur 2 en avant |
| PWM | X | Contrôle vitesse PWM | PWM | X | Contrôle vitesse PWM |
NOTE:
H: Niveau haut
L: Niveau bas
X: N'importe quel niveau.
Mode PWM
| Commande | Moteur | Pin Arduino | Pin Atmega328p | Signification |
|---|---|---|---|---|
| M1 | Gauche | 4 | PD4 | Contrôle du sens de rotation |
| E1 (PWM) | Gauche | 5 | PD5 | Contrôle de la vitesse de rotation |
| M2 | Droit | 7 | PD7 | Contrôle du sens de rotation |
| E2 (PWM) | Droit | 6 | PD6 | Contrôle de la vitesse de rotation |
- Exemple de code
Nous allons gérer les moteurs par des signaux PWM (-255 a 255), le signe moins (-) indique que le moteur fonctionne en marche arrière, et le signe plus (+) qu'il fonctionne en marche avant. Ce code nous permet de gérer les deux moteurs par la fonction setVitesse(vG,vD). Dans la suite nous allons l'utiliser pour gérer le déplacement du robot.
Code exemple
#include <avr/io.h>//Librairie AVR
#define topPWM 255 //Valeur Max du PWM (8bits)
void initMoteur()//PWM sur PD5 et PD6
{
//fpwm = fq / (topPWM * p)
//fpwmi:fréquence du PWM
//fq:fréquence du quark
//topPWM: valeur maximum du PWM
//p:prédiviseur
//Déclaration de sorties
DDRD |= (1 << PD4);//Sens du moteur Gauche
DDRD |= (1 << PD5);//PWM du moteur Gauche
DDRD |= (1 << PD7);//Sens du moteur Droit
DDRD |= (1 << PD6);//PWM du moteur Droit
TCCR0B |= (1 << CS00) | (1 << CS01);//Prédiviseur P=64
TCCR0A |= (1 << WGM00) | (1 << WGM01);//Mode FAST PWM
TCCR0A |= 1 << COM0A1;//PWM sur OC0A
TCCR0A |= 1 << COM0B1;//PWM sur OC0B
OCR0A = 0;//Valeur de comparaison pour A --> PD6
OCR0B = 0;//Valeur de comparaison pour B --> PD5
}
void setMoteurG(int16_t vit)//fonction pour gérer le moteur gauche
{
if (vit < 0)
{
vit = -vit;
PORTD |= (1 << PD4);//Moteur Gauche en arrière
}
else PORTD &= ~ (1 << PD4);//Moteur Gauche en avant
if (vit > topPWM) vit = topPWM;//Si jamais on met une valeur supérieure à 255, la vitesse maximum sera 255
OCR0B = vit;//Action sur le PWM --> PD5
}
void setMoteurD(int16_t vit)//fonction pour gérer le moteur droit
{
if (vit < 0)
{
vit = -vit;
PORTD |= (1 << PD7);//Moteur Droit en arrière
}
else PORTD &= ~ (1 << PD7);//Moteur Droit en avant
if (vit > topPWM) vit = topPWM;//Si jamais on met une valeur supérieure a 255, la vitesse maximum sera 255
OCR0A = vit;//Action sur le PWM --> PD6
}
void setVitesse(int16_t vG, int16_t vD)//cette fonction nous permet gérer les deux moteurs avec "une seule" ligne
{
setMoteurD(vD);
setMoteurG(vG);
}
int main()
{
initMoteur();
while(1)
{
setVitesse(100,100);//Exemple d’utilisation
}
}
Positionnement du robot: Explication du principe
Approximation par des segments de droites
Le positionnement du robot est obtenu par odométrie, c'est à dire que la position est obtenue par intégration de petits déplacements. L'intérêt de l'odométrie est qu'elle est assez simple à mettre en oeuvre et qu'elle est fiable. Par contre, quand on intègre les déplacements, on intègre aussi l'erreur ce qui fait que l'erreur de position croît avec le temps.
Entre deux lectures, on peut savoir de combien s'est déplacée chaque roue codeuse et il faut à partir de cela en déduire la position du robot.

Appelons ∆d et ∆g les distances (en mm) parcourues respectivement par les roues droites et gauches entre deux lectures des LM soit un intervalle de temps Te. Connaissant la position du robot à l'instant n-1, on cherche la pose à l'instant n.

On a donc : ∆moy_n = (∆d_n + ∆g_n)/2
∆dif_n = ∆d_n - ∆g_n
∆x_n = ∆moy_n cos(theta_n-1)
∆y_n = ∆moy_n sin(theta_n-1)
∆theta_n = ∆dif_n/L
x_n = x_n-1 + ∆x_n
y_n = y_n-1 + ∆y_n
theta_n = theta_n-1 + ∆theta_n
Estimation de la position du robot
Etude et Réalisation Carte Encodeurs
L'odométrie nous permettra d'estimer la position du robot en mouvement, des le début et jusqu'à la détection de la balise par la caméra. C'est à partir de la mesure des déplacements des roues, qu'on pourra reconstituer le mouvement du robot. En partant d'une position initiale connue et en intégrant les déplacements mesurés, on peut ainsi calculer à chaque instant la position courante du véhicule.
Pour mesurer le déplacement des roues, nous allons utiliser un encodeur, monté sur l'axe de chaque roue.

- ENCODEUR DE BASE:
Ce montage basique permet de mesurer la vitesse de rotation à partir de la fréquence, mais il ne permet pas de connaître le sens de rotation.

- ENCODEUR EN QUADRATURE:
Celui-ci nous permettra de connaître à la fois le sens et la vitesse des roues. Il est composé d’un disque rotatif, 1 led infrarouge et 2 capteurs optique décalé un par rapport à l’autre de 90°. C’est justement ce décalage la qui va nous permettre de connaître le sens de rotation de la roue. Suivant le sens de rotation, nous auront deux signaux déphasés en avance/retard de 90°. La vitesse sera déterminé en fonction de la fréquence.


Les signaux de sortie à l’oscilloscope
- CAPTEUR TCUT 1300. Nous allons utiliser ce capteur il nous permettra d'avoir le sens et la vitesse de chaque roue.
The TCUT1300X01 is a compact transmissive sensor that includes an infrared emitter and two phototransistor detectors, located face-to-face in a surface mount package.



- Schéma et dimensionnement des composants
Emiter: If = 10mA (Vf = 1.2V), Re = (5V-Vf)/If = 380 ohm.
Collector: Ic sat = 0.4mA (If = 10mA), Rmin = Vce /Ic = 12.5 kohm. Vce sat = 0.4V max (pour Ic sat = 0.4mA, If = 10mA ). On prendra Rc = 15 kohm.
Nous devons obtenir les signaux correspondents:
| Présence dent | Signal de sortie = 0 V |
| Absence dent | Signal de sortie = 5 V |

- Schéma et routage en Eagle


- Réalisation carte (2 exemplaires) et installation
- Carte simple face CMS.
TEST RÉALISÉ SUR LA CARTE FINIE:
| Présence dent | G1,G2,D1,D2 = 0 V |
| Absence dent | G1,G2,D1,D2 = 4.8 V |
Conclusion: Les valeurs sont cohérentes et exploitables.


Roue codeuse
Pour determiner la position du robot nous allons utiliser deux Roues Codeuses et deux capteurs (TCUT 1300). Nous avons créé le roue sur le logiciel GEFAO et fabrication avec la machine charlyrobot. Vous trouverez ici le fichier de la roue (Fichier:RoueCodeuse.zip).

Valeurs recu par les capteurs
Cette roue sera placer sur l'arbre des motors et sur les deux capteurs, lorsque le moteur est en train de tourner les capteurs va nous envoyer une signal qui se resamblera à:
- Si la roue en avant
Il faut remarquer que la signal 1 est en avance. Donc sur chaque front montant de la signal 1, la signal 2 est à 0. Et sur chanque front descendate de la signal 1, la signal 2 est à 1. Ce raisonnement sera utiliser dans le code du proogramme.

- Si la roue en arriere
Il faut remarquer que la signal 1 est en retard. Donc sur chaque front montant de la signal 1, la signal 2 est à 1. Et sur chanque front descendate de la signal 1, la signal 2 est à 0. Ce raisonnement sera aussi utiliser dans le code du proogramme.

Il faut remarquer que si le robot avance, la roue codeuse est en arriere et si le robot recule la roue codeuse est en avant. Ce effet est du aux engranages qui sont sur les moteurs et la roue.
Interruptions et timer
- Interruptions INT0 et INT1: Code example
Dans cette partie nous allons utiliser les interruptions et les timers. On utilisera les inturruptions (INT0 et INT1) pour dechancher un code a chaque fois que les dents de la roue codeuse travers le flux lumineuse du capteurs (sur le front montant et front descendant). Nous allons aussi utliser un timer qui sera dechanché sur un temps assez petit ( <10ms) pour calculer un deltaX, un deltaY et un detaTeta qui nous permetront de determiner la position du robot a chaque instante.
Code example
#include <avr/io.h>//Libreries AVR
volatile int8_t NbDentsD = 0; //Nombre de dents captés par le capteur (TCUT 1300) de la roue codeuse Droit
volatile int8_t NbDentsG = 0; //Nombre de dents captés par le capteur (TCUT 1300) de la Roue Codeuse Gauge
ISR(INT0_vect)
{
//Sur chaque roue nous avons un emeteur et deux recepteurs, ces deux seront lus sur le pates PD2 et PB0
uint8_t Pin2 = PIND & (1 << PD2); //INTERRUPTION INT0 sur PD2
uint8_t Pin8 = PINB & (1 << PB0);
if (Pin2 != 0)
{
if (Pin8 == 0) NbDentsD++;//Si la roue droit avance dont on aditionne le dents
else NbDentsD--;//sinon on soustrait les dents, car cela signifie que le roue est en arrière
}
else if (Pin2 == 0)
{
if (Pin8 != 0) NbDentsD++;
else NbDentsD--;
}
}
ISR(INT1_vect)
{
uint8_t Pin3 = PIND & (1 << PD3); //INTERRUPTION INT1 sur PD3
uint8_t Pin9 = PINB & (1 << PB1);
if (Pin3 != 0)
{
if (Pin9 == 0) NbDentsG++;//Si la roue gauge avance dont on aditionne le dents
else {
NbDentsG--;//sinon on soustrait les dents, car cela signifie que le roue est en arrière
}
}
else if (Pin3 == 0)
{
if (Pin9 != 0) NbDentsG++;
else {
NbDentsG--;
}
}
}
void int0()
{
//CONFIGURATION INTERRUPTION INT0
//Pin2 --> PD2--> INT0 entrée
EIMSK |= 1 << INT0; //Autorisation interruption INT0
EICRA |= 1 << ISC00; //Activation sur changement d'etat sur PD2
}
void int1()
{
//CONFIGURATION INTERRUPTION INT1
//PIN3 -->PD3--> INT1 entrée
EIMSK |= 1 << INT1; //Autorisation interruption INT1
EICRA |= 1 << ISC10; //Activation sur changement d'etat sur PD3
}
void sei_interruption()
{
sei(); //Autorisation global d'interruptions
}
int main()
{
int0();//Interruption 0
int1();//Interruption 1
sei_interruption();//Autorisation d'interruptions
while(1)
{
}
}
- TIMER 1
En faite nous allons calculer la position du robot en ajoutant de petits deltas de postition lequels seront calculer sur un temps suffisamment petit ( <20ms) pour eviter que l'erreur soit grand. On utilisera un drapeau pour eviter de faire de calculs dans le ISR(TIMER1_COMPA_vect), nous allons les faire plutot sur while(1), cela nous permettra de reduire l'erreur.
Code example
#include <avr/io.h>//Libreries AVR
void timer1()//CONFIGURATION DU TIMER1
{
//Tt1=(n*p)/fq
//Tt1: periode du timer
//n=valuer de comparaison (OCR1A)
//p:prediviseur
//fq:frequence du quark (arduino uno 16Mhz)
TCCR1B |= (1 << CS10) | (1 << CS11); //p=64
TCCR1B |= 1 << WGM12; //RAZ mode CTC
TIMSK1 |= 1 << OCIE1A; //Autorisation d'interruption de comparaison A
OCR1A = 7500; //Comparaison n=7500
}
ISR(TIMER1_COMPA_vect)
{
newCalc = true;//drapeau
}
int main()
{
timer1();
while (1)
{
if (newCalc == true)
{
//Calculs de la position
newCalc = false;
}
}
}
Suivons une ligne droite
On sait que le moteurs n'ont pas la vitesse, donc il faut essayer de faire cela par code. On va donc faire setVitesse(Vmax * cos(Teta + PI / 4.0), Vmax * sin(Teta + PI / 4.0)), les cos et sin nous permettra jouer sur la vitesse et de cette facon faire que le robot suis une ligne droite. Il faut remarquer qu'il ne va pas s'arreter.
Code de Suivons une ligne droite
#include <avr/io.h>//Libreries AVR
#include <math.h>//Libreries Math pour les calculs de sinus, cosinus, etc;
#define topPWM 255 //Valeur Max du PWM (8bits)
float d = 51.2; //Rayon des roues
float Delta_Dent = PI * d / 60.0; //Espacement entre chaque dent de la roue.
float L = 230.0; //Distence entre les centre des roues.
volatile int8_t NbDentsD = 0; //Nombre de dents captés par le capteur TCUT 1300 de la roue codeuse Droit
volatile int8_t NbDentsG = 0; //Nombre de dents captés par le capteur TCUT 1300 de la Roue Codeuse Gauge
float Delta_D = 0;
float Delta_G = 0;
float Delta_moy = 0;
float Delta_dif = 0;
float Delta_teta = 0;
float Delta_X = 0;
float Delta_Y = 0;
float Position_X = 0;
float Position_X_precendent = 0;
float Position_Y = 0;
float Position_Y_precendent = 0;
float Teta = 0;
float Teta_precedent = 0;
float Teta_consigne = 0; //Angle qu'on veux attaindre
float X_consigne = 0; //Position en X qu'on veux attaindre
float Y_consigne = 0; //Position en Y qu'on veux attaindre
volatile boolean newCalc = true;//Drapeau qui nous permetra de
float Vmax = 0;
void int0()
{
//CONFIGURATION INTERRUPTION INT0
//Pin2 --> PD2--> INT0 entrée
EIMSK |= 1 << INT0; //Autorisation interruption INT0
EICRA |= 1 << ISC00; //Activation sur changement d'etat sur PD2
}
void int1()
{
//CONFIGURATION INTERRUPTION INT1
//PIN3 -->PD3--> INT1 entrée
EIMSK |= 1 << INT1; //Autorisation interruption INT1
EICRA |= 1 << ISC10; //Activation sur changement d'etat sur PD3
}
void timer1()//CONFIGURATION DU TIMER1
{
//Tt1=(n*p)/fq
//Tt1: periode du timer
//n=valuer de comparaison (OCR1A)
//p:prediviseur
//fq:frequence du quark (arduino uno 16Mhz)
TCCR1B |= (1 << CS10) | (1 << CS11); //p=64
TCCR1B |= 1 << WGM12; //RAZ mode CTC
TIMSK1 |= 1 << OCIE1A; //Autorisation d'interruption de comparaison A
OCR1A = 7500; //Comparaison n=7500
}
void initMoteur()//PWM sur PD5 et PD6
{
//fpwm = fq / (topPWM * p)
//fpwmi:frequence du PWM
//fq:frequance du quark
//topPWM: valeur maximun du PWM
//p:prediviseur
//Declaration de sorties
DDRD |= (1 << PD4);//Sens du motor Gauge
DDRD |= (1 << PD5);//PWM du motor Gauge
DDRD |= (1 << PD7);//Sens du motor Droit
DDRD |= (1 << PD6);//PWM du motor Droit
TCCR0B |= (1 << CS00) | (1 << CS01);//Prediviseur P=64
TCCR0A |= (1 << WGM00) | (1 << WGM01);//Mode FAST PWM
TCCR0A |= 1 << COM0A1;//PWM sur OC0A
TCCR0A |= 1 << COM0B1;//PWM sur OC0B
OCR0A = 0;//Valeur de comparaison pour A --> PD6
OCR0B = 0;//Valeur de comparaison pour B --> PD5
}
void sei_interruption()
{
sei(); //Autorisation global d'interruptions
}
ISR(INT0_vect)
{
//Sur chaque roue nous avons un emeteur et deux recepteurs, ces deux seront lu sur le pate PD2 et PB0
uint8_t Pin2 = PIND & (1 << PD2); //INTERRUPTION INT0 sur PD2
uint8_t Pin8 = PINB & (1 << PB0);
if (Pin2 != 0)
{
if (Pin8 == 0) NbDentsD++;//Si la roue droit avance dont on aditionne le dents
else NbDentsD--;//sinon on soustrait les dents, car cela signifie que le roue est en arrière
}
else if (Pin2 == 0)
{
if (Pin8 != 0) NbDentsD++;
else NbDentsD--;
}
}
ISR(INT1_vect)
{
uint8_t Pin3 = PIND & (1 << PD3); //INTERRUPTION INT1 sur PD3
uint8_t Pin9 = PINB & (1 << PB1);
if (Pin3 != 0)
{
if (Pin9 == 0) NbDentsG++;//Si la roue gauge avance dont on aditionne le dents
else {
NbDentsG--;//sinon on soustrait les dents, car cela signifie que le roue est en arrière
}
}
else if (Pin3 == 0)
{
if (Pin9 != 0) NbDentsG++;
else {
NbDentsG--;
}
}
}
ISR(TIMER1_COMPA_vect)
{
newCalc = true;
}
void setMoteurG(int16_t vit)//fontion pour gener le moteur gauge
{
if (vit < 0)
{
vit = -vit;
PORTD |= (1 << PD4);//Moteur Gauge en arrière
}
else PORTD &= ~ (1 << PD4);//Moteur Gauge en avant
if (vit > topPWM) vit = topPWM;//Si jamais on met une vauleur superior a 255, la vitesse maximun sera 255
OCR0B = vit;//Action sur le PWM --> PD5
}
void setMoteurD(int16_t vit)//fontion pour gener le moteur droit
{
if (vit < 0)
{
vit = -vit;
PORTD |= (1 << PD7);//Moteur Droite en arrière
}
else PORTD &= ~ (1 << PD7);//Moteur Droite en avant
if (vit > topPWM) vit = topPWM;//Si jamais on met une vauleur superior a 255, la vitesse maximun sera 255
OCR0A = vit;//Action sur le PWM --> PD6
}
void setVitesse(int16_t vG, int16_t vD)//cette fontion nous permet gerer les deux moteurs avec "une seule" ligne
{
setMoteurD(vD);
setMoteurG(vG);
}
int main()
{
int0();//Interruption 0
int1();//Interruption 1
timer1();//Timer 1
initMoteur();//PWM
sei_interruption();//Autorisation d'interruptions
while (1)//Boucle infinie
{
if (newCalc == true)
{
Delta_D = (NbDentsD * Delta_Dent);//pas de la roue droit à chaque declanchement du TIMER 1.
Delta_G = (NbDentsG * Delta_Dent); //pas de la roue gauge à chaque declanchement du TIMER 1.
NbDentsG = 0;//Remise à zéro à chaque declanchement du TIMER 1.
NbDentsD = 0;//Remise à zéro sà chaque declanchement du TIMER 1.
Delta_moy = (1 / 2.0) * (Delta_D + Delta_G);//pas du robot à chaque declanchement du TIMER 1.
Delta_dif = Delta_D - Delta_G;
Delta_teta = Delta_dif / L;//Calcul de Delta_teta en rad à chaque declanchement du TIMER 1.
Delta_X = Delta_moy * cos(Teta_precedent);//pas sur X du deplacement du robot à chaque declanchement du TIMER 1.
Delta_Y = Delta_moy * sin(Teta_precedent);//pas sur Y du deplacement du robot à chaque declanchement du TIMER 1.
Teta = Teta_precedent + Delta_teta;//Angle de desviation par rapport à l'axe X du robot.
Teta_precedent = Teta;//Angle de desviation precedent par rapport à l'axe X du robot.
Position_X = Position_X_precendent + Delta_X;//Potition actuelle du robot en X
Position_X_precendent = Position_X;//Position precedente du robot en X
Position_Y = Position_Y_precendent + Delta_Y;//Potition actuelle du robot en Y
Position_Y_precendent = Position_Y;//Position precedente du robot en Y
Vmax = 250;//valeur maximun qu'on impose aux moteurs
setVitesse(Vmax * cos(Teta + PI / 4.0), Vmax * sin(Teta + PI / 4.0));
newCalc = false;
}
}
}
Suivons une consigne
Cette fois nous pourrons donner une valeur en X ey Y et le robot sera capable d'arriver au point et s'arreté. La valeurs doit etre donnée en cm.
ws2812_config.h
//Code precedente (suivons un ligne)
int main()
{
//Configurations
while (1)//Boucle infinie
{
if (newCalc == true)
{
//Calculs
X_consigne = 100;//valeur donné en cm
Y_consigne = 50;//valeur donné en cm
Teta_consigne = atan((Y_consigne - Position_Y / 50.0) / (X_consigne - Position_X / 50.0)) - Teta;//Nous divisons par 50 pour avoir les valeur en cm
Vmax = 250;//valeur maximun qu'on impose aux moteurs
setVitesse(Vmax * cos(Teta_consigne + PI / 4.0), Vmax * sin(Teta_consigne + PI / 4.0));
newCalc = false;
}
}
}
Detection d'obstacles
Caméra
Choix camera
Nous avons testé 3 cameras différentes, la PiCam, la CMUCam3 et la CMUCam5 Pixy


Nous avons choisi d'utiliser la CMUCam 5(site CMU cam 5) car elle est beaucoup plus simple d'utilisation que les deux autres. En effet, celle ci dispose d'une interface dre réglage, PixyMon, lui permettant d'enregistrer les signatures des objets à détecter, et de régler l'acquisition pour restreindre la détection à ces signatures précises. De plus, celle ci dispose d'un support mû par des servomoteurs permettant d'élargir son champ de vision.
Camera CMU cam 5
Tout d’abord nous avons réalisé une simple reconnaissance d'objet grâce au logiciel, il suffit pour cela de sélectionner l'objet en question via une interface, Pixymon. Nous avons ensuite choisi d'utiliser une balise lumineuse pour que la camera la repère le plus loin possible. balise test.
Grâce à cette balise nous avons pu déterminer la distance maximale de détection avec une balise de taille réglementaire. Nous avons ainsi déterminé que la balise était capable d'effectuer une détection à approximativement 6m.
Programme de gestion du cap
Nous avons réalisé un programme permettant de récupérer la position en X d'un objet par rapport à la caméra
Code exemple
//////////////////////////////////////////
// Fonction cap
//////////////////////////////////////////
/**************************************************************
Description : indique le cap à suivre grace à la camera Pixy.
Entrées : Aucune
Sorties : Un int allant de -160 à 160. Une valeur nulle indique
que la cible se trouve au centre du champ de vision
de Pixy. Une valeur positive indique que la cible se
trouve à droite de Pixy, une valeur négative indique
la gauche.
***************************************************************/
int cap()
{
int compteur1;
uint16_t blocks;
/*Récupération des "blocs". Un bloc est une zone rectangulaire
définie par Pixy, possedant plusieurs caractéristiques (hauteur,
position en x/y, couleur...)*/
blocks = pixy.getBlocks();
/*Dans le cas ou un bloc est détecté, la caméra renverra la
position en x de celui ci. La valeur est centrée en zero.*/
if (blocks)
{
return(pixy.blocks[0].x );
}
}
Cette fonction a été testée avec le main suivant
Code exemple
#include <SPI.h>
#include <Pixy.h>
Pixy pixy;
void setup()
{
Serial.begin(9600);
Serial.print("Starting...\n");
pixy.init();
}
int cap()
{
int compteur1;
uint16_t blocks;
blocks = pixy.getBlocks();
if ((blocks) && (pixy.blocks[0].x != 0))
{
return(pixy.blocks[0].x );
}
}
void loop()
{
delay(100);
Serial.println(cap());
delay(500);
}
Il est nécessaire d'appeler les bibliothèques SPI.h et Pixy.h, et de déclarer et d'initialiser Pixy dans le setup. Ceprogramme ne permet cepandant pas l'usage des servomoteurs, limitant le champ de vision.
Mise à l’arrêt du robot et le perçage du ballon
La mise à l’arrêt du robot et le perçage du ballon doivent avoir lieu simultanément. Cela doit se produire quand le robot est arrivé dans le coin opposé.
Capteur de "Mise à l’arrêt" du robot
Pour se diriger vers le bon coin, le robot est guidé par les roues codeuses et par la caméra qui suit une balise lumineuse. Maintenant qu'il est guidé dans la bonne direction, nous devons procéder à une mise à l’arrêt rapide des qu il franchi le coin opposé. Le coin possède la particularité d'avoir une surface au sol de couleur blanche, alors que le reste du sol est bleu. Une solution évidente est d’utiliser le principe d’une diode émettrice infrarouge et d'un photo transistor récepteur infrarouge. Ainsi on pourra arrêter le robot quand il franchit une surface blanche.

- Le capteur CNY70 :
Nous pourrons utiliser ce capteur infrarouge pour détecter la couleur du sol.


- Schéma et dimensionement des composants
Emetteur: If = 20mA (Vf = 1.15V), Re = (5V-Vf)/If = 195 ohm.
Collecteur: Ic = 0.5mA (pour If = 20mA, Vce = 5V, d = 2mm), Rc = Vce /Ic = 10 kohm.
Nous devons obtenir les signaux correspondents:
| Sol noir/surface non reflechissante | env 0 V |
| Sol bleu | env 3 V |
| Sol blanc/surface bien reflechissante | env 5 V |
- Schéma électrique, routage en Eagle et fabrication de la carte



Systeme "Perçage du Ballon"
- La partie mécanique
Nous avons testé deux matériaux pour faire le percage: le fer et le plastique.
Pour l'aiguille, nous avons choisi d'utiliser du fer, plus facile à affûter.


- La commande électrique du moteur
Nous avons testé deux moteurs ,un moteur normal et un SM-S4303R. Finalement nous avons choisi le moteur normal,car le SM-S4303R est moins puissant et ne tourne pas assez vite pour percer le ballon.
Nous avons un moteur 5V qui tourne à un régime élevé. Au démarrage il demande beaucoup de courant. Comme l'Arduino ne peut pas fournir des courants supérieur à 20mA, pour commander le moteur nous allons utiliser un transistor MOSFET. Ce transistor permet de commuter des courants assez importants.
Pour que le transistor devient passant, nous commandons le gate en +5V avec Arduino. On rajoute une résistance de tirage de 1Mohm entre le gate et la masse, pour éviter que le transistor devienne passant à cause d'une perturbation externe.
Caractéristique transistor MOS:
| Marque | IRF2204 |
| Vdss | 40 V |
| Rds | 3.6 mohm |
| Id | 210 A |

Schéma électrique et routage sur Eagle


Fabrication carte et installation

Réalisation Carte des "Entrées et Sorties" et du Pont H
Objectifs et Composants utilisés )
- Objectif: concevoir une carte compacte qui va héberger le composant L298N pour le contrôle des moteurs ainsi que toutes les entrées et les sorties.La carte devra s’emboîter sur la carte Arduino MEGA.
| Les Entrées | Les Sorties |
|---|---|
| Alimentation (5V) | Moteur Gauche |
| Alimentation moteurs (12V) | Moteur Droit |
| Encodeurs (TCUT1300) | Commande perçage Ballon |
| Camera (CMUCam 5) | |
| 3 capteurs obstacles (IR) | |
| Couleur Sol (CNY70) | |
| PWM Moteurs | |
| Sens rotation Moteurs |
- Références des composants utilisés:
| Qté | Nom | Référence Eagle |
|---|---|---|
| 1 | Dual H-Bridge | L298n |
| 1 | Radiateur | pour L298n |
| 4 | Résistance | 1 ohm package 207/10 |
| 8 | Diode | 1N4004 |
| 2 | Condensateur | E 1.8-4 package 100nF |
| 1 | Connecteur ISP | AVR-ISP-6 |
| 1 | Connecteur | Farnell 6 pins CMS |
| 6 | Connecteur | Molex 2 pins 22-27-2021-02 traversant |
| 3 | Connecteur | Molex 3 pins 22-27-2031-03 traversant |
Schéma électrique de la carte (Eagle)

Routage et correspondance des pins (Eagle)

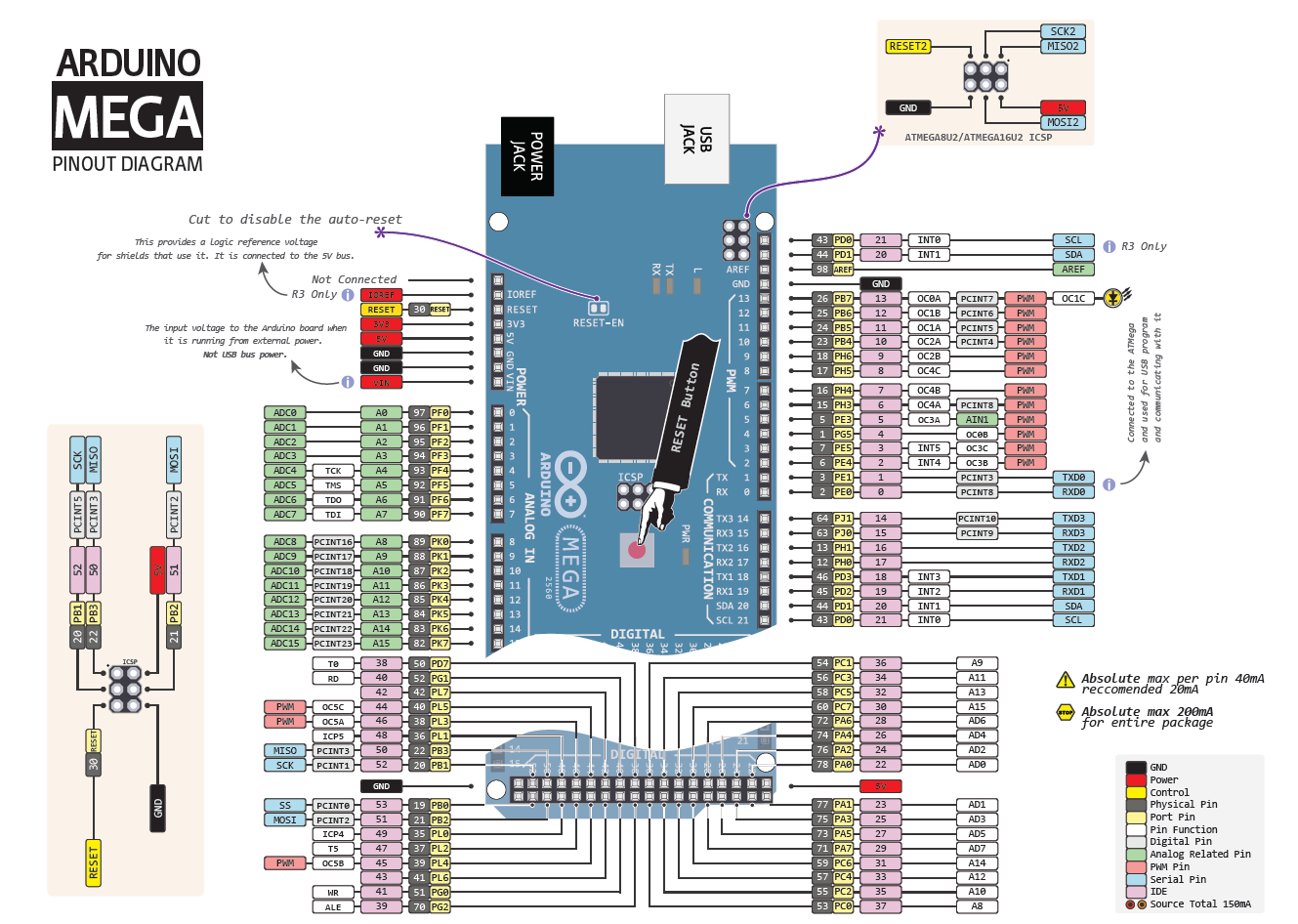
La commande des Moteurs de Roues (L298n H-Bridge)
| Commande | Moteur | Pin Arduino | Pin ATmega2560 | Signification |
|---|---|---|---|---|
| EnableG (PMW) | Gauche | 5 | PE3 | Contrôle de la vitesse de rotation roue G |
| Input1 | Gauche | 10 | PB4 | Contrôle du sens de rotation (H/L) |
| Input2 | Gauche | 4 | PG5 | Contrôle du sens de rotation (H/L) |
| EnableD (PMW) | Droit | 6 | PH3 | Contrôle de la vitesse de rotation roue D |
| Input3 | Droit | 11 | PB5 | Contrôle du sens de rotation (H/L) |
| Input4 | Droit | 7 | PH4 | Contrôle du sens de rotation (H/L) |
Les signaux d'entrée et de sortie
| Signal | Type | Pin Arduino | Pin ATmega2560 | Signification |
|---|---|---|---|---|
| ++roueG | digital INPUT | 9 | PH6 | Capteur sens positif roue G |
| --roueG | digital INPUT | 3 | PE5(INT5) | Capteur sens négatif et vitesse roue G |
| ++roueD | digital INPUT | 8 | PH5 | Capteur sens positif roue D |
| --roueD | digital INPUT | 2 | PE4(INT4) | Capteur sens négatif et vitesse roue D |
| Out Ballon | digital OUTPUT | 12 | PB6 | Signal de commande pour le Perçage du Ballon |
| IR gauche | analog INPUT | 96 | PF1 | Signal distance obstacle capteur AV gauche |
| IR centre | analog INPUT | 95 | PF2 | Signal distance obstacle capteur AV centre |
| IR droit | analog INPUT | 94 | PF3 | Signal distance obstacle capteur AV droit |
| Couleur SOL | analog INPUT | 93 | PF4 | Signal 0-5 V suivant couleur et nature du sol |
| MISO | liason ISP | 50 | PB3 | Communication avec la Caméra |
| SCK | liason ISP | 52 | PB1 | Communication avec la Caméra |
| SS | liason ISP | 53 | PB0 | Communication avec la Caméra |
| MOSI | liason ISP | 51 | PB2 | Communication avec la Caméra |
| RESET | liason ISP | 30 | RESET | Communication avec la Caméra |
Média:Arduino-mega-pinout-diagram.png
La carte finale et les connecteurs




{kind=link}
Problèmes rencontrés:
Comme on peut voir sur la figure numéro 2, une piste à été coupé lors de la réalisation de la carte. Cet défaut s'est manifesté par une non cohérence entre le trajet demandé au robot et le trajet réel. Il nous a fallu 1 jour et demi pour trouver le problème et cela à l'aide du professeur et à travers les mesures avec un oscilloscope sur les signaux de commande des moteurs et sur les bornes de chaque moteur. Nous avons constaté des surtensions, des perturbations aux bornes d'un moteur. Cela venait d'une diode dont la piste était coupée. Le défaut a été remédié et nous avons constaté le fonctionnement normal du robot.
Leçons à tirer: Vérification avec rigueur la continuité des toutes les pistes en 2 étapes:
- après la fabrication de la carte
- après avoir soudé tous les composants
De même se servir toujours de l'oscilloscope pour visualiser les différents signaux en temps réel.
Code complet
Pour gérer les différents fonctionalités du robot nous avons utilisé le code suivant:
Code exemple
#include <avr/io.h>
#include <math.h>
#include <SPI.h>//Libreries
#include <Pixy.h>//Libreries
#define topPWM 255 //Valeur Max du PWM (8bits)
Pixy pixy;
float dD = 52.21;//52.21; //Diametre de la roue codeuse droite(mm)
float dG = 52.98;//52.98; //Diametre de la roue codeuse gauge(mm)
float Delta_DentD = PI * dD / 60.0;//Espacement entre chaque dent de la roue.
float Delta_DentG = PI * dG / 60.0;
float L = 233.0; //Distence entre les centre des roues.
volatile int8_t NbDentsD = 0; //Nombre de dents captés par le capteur **** de la roue codeuse Droit
volatile int8_t NbDentsG = 0; //Nombre de dents captés par le capteur **** de la Roue Codeuse Gauge
float Delta_D = 0;
float Delta_G = 0;
float Delta_moy = 0;
float Delta_dif = 0;
float Delta_teta = 0;
float Delta_X = 0;
float Delta_Y = 0;
float Position_X = 0;
float Position_X_precendent = 0;
float Position_Y = 0;
float Position_Y_precendent = 0;
float Teta = 0;
float Teta_precedent = 0;
float Teta_consigne = 0; //Angle qu'on veux attaindre
float X_consigne = 0; //Position en X qu'on veux attaindre
float Y_consigne = 0; //Position en Y qu'on veux attaindre
volatile boolean newCalc = true;//Drapeau qui nous permetra de
int Vmax = 0;
int cm_IR_G;
int cm_IR_C;
int cm_IR_D;
//ROUES CODEUSES
void int4()
{
//CONFIGURATION INTERRUPTION INT4
//Pin2 --> PE4--> INT4 entrée
EIMSK |= 1 << INT4; //Autorisation interruption INT4
EICRB |= (1 << ISC40); //Activation sur changement d'etat de PE4
}
ISR(INT4_vect)
{
//Sur chaque roue nous avons un emeteur et deux recepteurs, ces deux seront lu sur le pate PE4 et PH5
uint8_t Pin2 = PINE & (1 << PE4); //INTERRUPTION INT4 sur PE4
uint8_t Pin8 = PINH & (1 << PH5);
if (Pin2 != 0)
{
if (Pin8 == 0) NbDentsD++;//Si la roue droit avance dont on aditionne le dents
else NbDentsD--;//sinon on soustrait les dents, car cela signifie que le roue est en arrière
}
else if (Pin2 == 0)
{
if (Pin8 != 0) NbDentsD++;
else NbDentsD--;
}
}
void int5()
{
//CONFIGURATION INTERRUPTION INT5
//Pin3 -->PE5--> INT5 entrée
EIMSK |= 1 << INT5; //Autorisation interruption INT5
EICRB |= (1 << ISC50); //Activation sur changement d'etat de PE5
}
ISR(INT5_vect)
{
uint8_t Pin3 = PINE & (1 << PE5); //INTERRUPTION INT5 sur PE5
uint8_t Pin9 = PINH & (1 << PH6);
if (Pin3 != 0)
{
if (Pin9 == 0) NbDentsG++;//Si la roue gauge avance dont on aditionne le dents
else {
NbDentsG--;//sinon on soustrait les dents, car cela signifie que le roue est en arrière
}
}
else if (Pin3 == 0)
{
if (Pin9 != 0) NbDentsG++;
else {
NbDentsG--;
}
}
}
//CONFIGURATION DU TIMER1
void timer1()
{
//Tt1=(n*p)/fq
//n=Tt1*fq/p
//Tt1: periode du timer
//n=valuer de comparaison (OCR1A)
//p:prediviseur
//fq:frequence du quark (arduino Mega 16Mhz)
TCCR1B |= (1 << CS10) | (1 << CS11); //p=64
TCCR1B |= 1 << WGM12; //RAZ mode CTC
TIMSK1 |= 1 << OCIE1A; //Autorisation d'interruption de comparaison A
OCR1A = 5000; //Comparaison , Tt1=20ms,
}
ISR(TIMER1_COMPA_vect)
{
newCalc = true;
}
//PONT H (Moteurs)
void initMoteur()//PWM sur PE3 (Gauge) et PH3(Droit)
{
//fpwm = fq / (topPWM * p)
//fpwmi:frequence du PWM
//fq:frequance du quark
//topPWM: valeur maximun du PWM
//p:prediviseur
//Declaration de sorties
DDRG |= (1 << PG5);//Sens du motor Gauge
DDRB |= (1 << PB4);//Sens du motor Gauge
DDRE |= (1 << PE3);//PWM du motor Gauge OC3A
DDRH |= (1 << PH4);//Sens du motor Droit
DDRB |= (1 << PB5);//Sens du motor Gauge
DDRH |= (1 << PH3);//PWM du motor Droit OC4A
//Timer3 PE3
TCCR3A |= (1 << WGM30);//Mode FAST PWM
TCCR3B |= (1 << WGM32);
TCCR3B |= (1 << CS30) | (1 << CS31);//Prediviseur p=64
//Timer4 PH3
TCCR4A |= (1 << WGM40);//Mode FAST PWM
TCCR4B |= (1 << WGM42);
TCCR4B |= (1 << CS40) | (1 << CS41);//Prediviseur P=64
TCCR3A |= 1 << COM3A1;//PWM sur OC3A
TCCR4A |= 1 << COM4A1;//PWM sur OC4A
OCR3A = 0;//Valeur de comparaison initial --> PE3
OCR4A = 0;//Valeur de comparaison initial --> PH3
}
void sei_interruption()
{
sei(); //Autorisation global d'interruptions
}
void setMoteurG(int16_t vit)//fontion pour gener le moteur gauge
{
if (vit < 0)
{
vit = -vit;
PORTG |= (1 << PG5);//Moteur Gauge en arrière
PORTB &= ~ (1 << PB4);
}
else {
PORTG &= ~ (1 << PG5);//Moteur Gauge en avant
PORTB |= (1 << PB4);
}
if (vit > topPWM) vit = topPWM;//Si jamais on met une vauleur superior a 255, la vitesse maximun sera 255
OCR3A = vit;//Action sur le PWM --> PE3
}
void setMoteurD(int16_t vit)//fontion pour gener le moteur droit
{
if (vit < 0)
{
vit = -vit;
PORTH &= ~ (1 << PH4); //Moteur Droite en avant
PORTB |= (1 << PB5);
}
else
{
PORTH |= (1 << PH4); //Moteur Droite en arrière
PORTB &= ~ (1 << PB5);
}
if (vit > topPWM) vit = topPWM;//Si jamais on met une vauleur superior a 255, la vitesse maximun sera 255
OCR4A = vit;//Action sur le PWM --> PH3
}
void setVitesse(int16_t vG, int16_t vD)//cette fontion nous permet gerer les deux moteurs avec "une seule" ligne
{
setMoteurD(vD);
setMoteurG(vG);
}
float cap()
{
int compteur1;
int blocks;
/*Récupération des "blocs". Un bloc est une zone rectangulaire
définie par Pixy, possedant plusieurs caractéristiques (hauteur,
position en x/y, couleur...)*/
blocks = pixy.getBlocks();
/*Dans le cas ou un bloc est détecté, la caméra renverra la
position en x de celui ci. La valeur est centrée en zero.*/
return (pixy.blocks[0].x);
}
void Delta()
{
Delta_D = (NbDentsD * Delta_DentD);//pas de la roue droit à chaque declanchement du TIMER 1.
Delta_G = (NbDentsG * Delta_DentG); //pas de la roue gauge à chaque declanchement du TIMER 1.
NbDentsG = 0;//Remise à zéro à chaque declanchement du TIMER 1.
NbDentsD = 0;//Remise à zéro sà chaque declanchement du TIMER 1.
Delta_moy = (1 / 2.0) * (Delta_D + Delta_G);//pas du robot à chaque declanchement du TIMER 1.
Delta_dif = Delta_D - Delta_G;
Delta_teta = Delta_dif / L;//Calcul de Delta_teta en rad à chaque declanchement du TIMER 1.
Delta_X = (1 / 50.0) * Delta_moy * cos(Teta_precedent); //pas sur X du deplacement du robot à chaque declanchement du TIMER 1.
Delta_Y = (1 / 50.0) * Delta_moy * sin(Teta_precedent); //pas sur Y du deplacement du robot à chaque declanchement du TIMER 1.
}
void initADC1()
{
ADCSRA |= 1 << ADEN;
ADMUX |= 1 << REFS0;
ADCSRA |= (1 << ADPS0) | (1 << ADPS1) | (1 << ADPS2);
}
boolean a = true;
int adcc;
int mpb = 0;
void MOteurBallon() { // fonctionnement du robot
if (adcc < 150) // detecte que la couleur au sol est bleu
{
setVitesse(-60, -60); // bloque les moteurs
if (mpb < 1) { // permet a la boucle de s'effectuer qu'une seule fois
_delay_ms(1000); // attend que le robot s'arrete totalement
PORTB |= 1 << PB6; // demarre le moteur pour percer le ballon
setVitesse(0, 0); // eteind totalement les moteurs du robot
_delay_ms(2000); // permet de faire tourner le moteur pour percer le ballon pendant 2 seconde
PORTB &= ~(1 << PB6); //eteind le moteur pour percer le ballon
mpb++; // permet a la boucle de s'effectuer qu'une seule fois
a = false; // permet de arrèter le programme de fonctionnement
}
}
else // detecte que la couleur au sol est blanche
{
PORTB &= ~(1 << PB6); // permet d'etre sur que le moteur pour percer le ballon ne demarre pas
if ((cap() > 90) && (cap() < 290)) // il n'y a pas d'obstacles et la camera detecte la balise
setVitesse((240 + cap() / 2.0 - 159 / 2.0), (240 - cap() / 2.0 + 159 / 2.0)); // la vitesse des moteurs varies pour avoir
//la balise au centre de la camera
else // il n'y a pas d'obstacles et la camera ne detecte pas la balise
//setVitesse(Vmax * cos(Teta_consigne + PI / 4.0), Vmax * sin(Teta_consigne + PI / 4.0));
setVitesse(200, 250 ); // le robot tourne vers la gauche jusqu'a ce que la camera detecte a nouveau la balise
}
}
int n = 0;
float dis = 0;
float k1 = 0;
float kmax = 0;
int main()
{
int4();//Interruption 4
int5();//Interruption 5
timer1();//Timer 1
initMoteur();//PWM
initADC1();
sei_interruption();//Autorisation d'interruptions
Serial.begin(9600);
Serial.print("Starting...\n");
pixy.init();
Serial.print("Pixy Initiated");
while (1)//Boucle infinie
{
if (a == true) {
if (newCalc == true)
{
Delta();
Teta = Teta_precedent + Delta_teta / 5.0; //Angle de desviation par rapport à l'axe X du robot.
Teta_precedent = Teta;//Angle de desviation precedent par rapport à l'axe X du robot.
Position_X = Position_X_precendent + Delta_X;//Potition actuelle du robot en X
Position_X_precendent = Position_X;//Position precedente du robot en X
Position_Y = Position_Y_precendent + Delta_Y;//Potition actuelle du robot en Y
Position_Y_precendent = Position_Y;//Position precedente du robot en Y
X_consigne = 1200;//47;//502;//522;//140;//271;//800;//469;//383 ;//valeur donné en cm
Y_consigne = 0;//502;//47;//140;//522;//469;//0;//271;// 383;//valeur donné en cm
Teta_consigne = atan((Y_consigne - Position_Y) / (X_consigne - Position_X)) - Teta;
dis = sqrt(pow(X_consigne - Position_X, 2) + pow(Y_consigne - Position_Y, 2));
kmax = 1.37; //1.37;//0.95;//1.0;
k1 = kmax;
if (dis < 400) k1 = 0;
Vmax = k1 * 255; //valeur maximun qu'on impose aux moteurs
ADMUX |= (1 << MUX0);
ADCSRA |= 1 << ADSC;
while ((ADCSRA & (1 << ADSC)) == 1); //{Serial.println("a");}
//cm_IR_G = pow(3027.4/ADC,1.2134);
//Serial.println(cm_IR_G);
//Serial.print(" ");
ADMUX &= ~(1 << MUX0);
ADMUX |= (1 << MUX1);
ADCSRA |= 1 << ADSC;
while ((ADCSRA & (1 << ADSC)) == 1); //{Serial.println("a");}
//cm_IR_C = pow(3027.4/ADC,1.2134);
//Serial.println(cm_IR_C);
//Serial.print(" ");
ADMUX &= ~(1 << MUX1);
ADMUX |= (1 << MUX0) | (1 << MUX1);
ADCSRA |= 1 << ADSC;
while ((ADCSRA & (1 << ADSC)) == 1); //{Serial.println("a");}
//cm_IR_D = pow(3027.4/ADC,1.2134);
//Serial.println(cm_IR_D);
//Serial.print(" ");
ADMUX &= ~((1 << MUX0) | (1 << MUX1));
ADMUX |= (1 << MUX2);
ADCSRA |= 1 << ADSC;
while ((ADCSRA & (1 << ADSC)) == 1);
adcc = ADC;
ADMUX &= ~(1 << MUX2);
if (Position_X > 250) { //le robot a fait plus de 2m
MOteurBallon(); // execute le programme pour suivre la balise
}
else // le robot a parcouru moins de 2m */
setVitesse(Vmax * cos(Teta_consigne + PI / 4.0), Vmax * sin(Teta_consigne + PI / 4.0));//le robot va droit grace a la roue codeuse
Serial.print(" ");
Serial.println(mpb);
newCalc = false;
}
}
else setVitesse(0, 0); //permet au moteur de ne pas redemarrer une fois que le robot est passer sur le bleu
}
}
Vidéo de Démonstration
VIDEO ICI [1]