ProjetAutomatisme2019 : Différence entre versions
| Ligne 26 : | Ligne 26 : | ||
| − | Comme vous pouvez le voir, c'est la carte '''numéro 8''' cela a toute son importance. Maintenant lancez un terminal de commande (linux uniquement) connectez la carte au réseau internet Node-RED local au GEII [[File: | + | Comme vous pouvez le voir, c'est la carte '''numéro 8''' cela a toute son importance. Maintenant lancez un terminal de commande (linux uniquement) connectez la carte au réseau internet Node-RED local au GEII [[File:NanoPi8.jpg|right|2304px|légende]] |
Version du 26 mars 2020 à 13:59
Sommaire
Partie 1 : Phase d'étude
Cahier des charges
- L'objectif de ce projet est de décentraliser un automate industriel à l'aide de cartes électroniques ainsi qu'une gestion à distance avec une interface homme-machine. Afin d'effectuer un tour avec des étapes sur des postes permettant certaines opérations tout cela à l'aide de distributeurs et actionneurs.
Fonctionnement du système
- Gestion générale
- Le convoyeur est géré par un seul et même automate regroupant les entrées ainsi que les sorties.Ce convoyeur possède 3 postes manuels ainsi que 3 postes gérés par l'automate. Notre travail se concentre donc sur les 3 postes automatisés.
- Chaque poste est composé d'un tapis qui est régit par différents capteurs inductifs TOR capteur Tout Ou Rien.
- Le premier type de capteur est utiliser pour identifier la palette pour analyser le type de pièce envoyé sur le convoyeur pour effectuer la bonne modification.
- Le deuxième type de capteur est le capteur de bourrage ; il permet en cas de surcharge trop importante sur le convoyeur de ne pas envoyer la pièce tant que le convoyeur n’est pas libéré.
- Le convoyeur dispose également d'actionneurs et de cran d'arrêt permettant d'arrêter la palette.
- Étude du fonctionnement
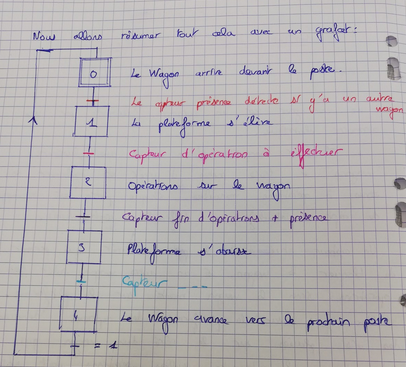
- Nous avons fait un grafcet du convoyeur pour détailler son fonctionnement.

Partie 2 : Création des cartes et programmation
- Séparation des parties.
- Pour faire marcher correctement l'ensemble nous avons décider de séparer le projet en 3 parties distinctes. La première partie consistait à
Partie 3 : Mise en place du système
Configuration de Node-RED et de la NanoPI
Allez chercher une NanoPi au magasin (avec son chargeur...) et branchez là aussi avec un câble Ethernet.


Maintenant rendez-vous sur Node-RED en tapant dans la barre du navigateur l'IP correspondante à votre carte en ajoutant le port 1880, ici dans notre exemple 10.98.9.57:1880

Essayez de brancher un bouton sur une broche de la NanoPi puis une LED sur une autre pour tester le réseau MQQT
avec Node-RED en vous aidant du PinOut

Prenez sur l'onglet de gauche "l'objet" MQQT Out et renommez-le comme vous le voulez,cela sera votre topic pour l'exemple on va l'appeler tuto1 voici un exemple minim'
donc pour l'exemple cela est ssh root@10.98.9.57. Faites entrée, puis tapez Yes

Configuration et fonctionnement du MCP23008
Le MCP23008 est un micro-contrôleur comportant 8 sorties de GP0 à GP7, il fonctionne grâce à une configuration d'adresse choisi arbitrairement.

Pour comprendre son fonctionnement, allez chercher une plaque à essais, une Nano Pi (et son chargeur...), et bien-sûr pleins de fils mâle-mâle et mâle-femelle. Voici un schéma simplifié montrant le branchement à effectuer.

{kind=link}
Branchez tout d'abord votre NanoPi et connectez là en ethernet, pour la configurer rendez-vous ici :