Système éclate ballon
Sommaire
Système éclate-ballon
I-Conception
On a besoin d’un support qui doit maintenir un ballon et fixer le servomoteur afin qu’on puisse utiliser le système. Pour ça on a choisi un support long qui suit les règles de la coupe et qui nous convient pour notre mécanisme, là on a la vue de face et la vue de gauche :

Là puisqu’on a un peu une idée sur la forme on va un peu le finir avec les dimensions demandés et les allègements pour avoir un une pièce la plus compacte avec un poids faible pour que le robot soit rapide, pour le fonctionnement on peut voir sur l’image qu’les flèches en jaune montre que la rotation du servomoteur nous permet d’avoir un translation de la tige rouge pointue, ainsi pour la flèche bleu qui montre le sens contraire.

II- Réalisation :
Puisqu'on a trouvé la forme et les dimensions, maintenant pour créer la pièce on doit trouver la matière et comment faire pour la concrétiser, donc on trouvé que l’impression 3D est la meilleur solution entre nos mains car on a une imprimante WITBOX 3D à l’IUT, ce qui nous va très bien parce que le plastique est une matière très légère et l’impression 3D va nous donner un modèle avec grande précision.
Pour imprimer on doit créer un modèle 3D sur le logiciel Sketchup, après la création on exporte le modèle 3D sur Cura pour l’imprimer.

SKETCHUP logiciel création de modèles 3D

CURA logiciel d'impression modèles 3D
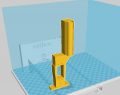
Modèle 3D



Fixation du ballon
Pour cette partie on a pensé à une solution simple et efficace, en s'inspirant de la ceinture on a essayé d'utiliser le même principe, comme ce que vous allez voir sur la photo ci-dessous :

III- Finalisation
Pour finaliser on a réuni les deux parties par une surface d’aluminium


