Cours:Accelerometre : Différence entre versions
m (→Un programme Arduino pour commencer) |
m (→Utiliser l'accéléromètre seul pour trouver l'attitude) |
||
| Ligne 23 : | Ligne 23 : | ||
=Utiliser l'accéléromètre seul pour trouver l'attitude= | =Utiliser l'accéléromètre seul pour trouver l'attitude= | ||
| − | Nous espérons montrer dans cette section que l'accéléromètre est un capteur lent mais surtout qu'il est sensible à l'accélération de pesanteur. C'est cette propriété du capteur que l'on va utiliser pour trouver l'attitude. En effet on sait que cette pesanteur est toujours dirigée vers le bas. | + | Nous espérons montrer dans cette section que l'accéléromètre est un capteur lent mais surtout qu'il est sensible à l'accélération de pesanteur. C'est cette propriété du capteur que l'on va utiliser pour trouver l'attitude. En effet on sait que cette pesanteur est toujours dirigée vers le bas. |
| + | |||
| + | Une autre manière de dire les choses est que si la seule accélération est celle de la pesanteur (pas d'autres forces que le poids) alors la projection de cette accélération sur les trois axes permet trouver l'attitude. On réalisera ce genre de calcul plus tard. | ||
==Partie Arduino== | ==Partie Arduino== | ||
La première question à se poser est de savoir comment câbler l'Arduino au capteur qui nous intéresse ? | La première question à se poser est de savoir comment câbler l'Arduino au capteur qui nous intéresse ? | ||
Version du 3 février 2015 à 19:12
Retour à la liste des Tps
Éléments de correction (page protégée)
Le but de ce projet est de comprendre et utiliser un capteurs moderne d'accélération.
Sommaire
Introduction aux capteurs IMU
IMU : Inertial Measurement Unit se traduit en français par Centrale à Inertie.
Le capteur que nous allons utiliser porte la référence GY-521 et est architecturé autour d'un MPU 6050 qui est composé de deux capteurs et un processeur :
- un capteur accéléromètre 3 axes (x,y et z) qui mesure une accélération
- un capteur gyroscope 3 axes qui mesure une vitesse angulaire
- Digital Motion Processor (DMP) capable de stocker des données et les restituer
La terminologie anglo-saxonne associée pour ce genre de capteur est 6 DOF (Degree of Freedom). On devrait traduire par 6 degrés de liberté mais il est préférable de traduire par 6 axes (3 pour l'accéléromètre et 3 pour le gyroscope). Le meilleur de ce qui se fait actuellement comporte 9 axes. En général c'est un magnétomètre qui est ajouté pour essayer de repérer le Nord magnétique. Ces 9 axes sont en général suffisants pour réaliser, en combinant les mesures de ces trois capteurs, une centrale à inertie de coût modeste.
Mais ces trois capteurs ont des défauts différents ce qui rend leur utilisation délicate.
Nous allons nous contenter de six axes dans la suite de ce projet.
La notion d'attitude
L'attitude en robotique (et en astronautique) désigne la direction des axes de la pièce mobile du robot. Elle est en général caractérisée par trois angles (roulis, tangage et cap ou lacet).
Ce mot d'attitude ne doit pas être confondu avec l'altitude ! Ces deux mots n'ont absolument rien en commun (à part l'orthographe voisine) !
Utiliser l'accéléromètre seul pour trouver l'attitude
Nous espérons montrer dans cette section que l'accéléromètre est un capteur lent mais surtout qu'il est sensible à l'accélération de pesanteur. C'est cette propriété du capteur que l'on va utiliser pour trouver l'attitude. En effet on sait que cette pesanteur est toujours dirigée vers le bas.
Une autre manière de dire les choses est que si la seule accélération est celle de la pesanteur (pas d'autres forces que le poids) alors la projection de cette accélération sur les trois axes permet trouver l'attitude. On réalisera ce genre de calcul plus tard.
Partie Arduino
La première question à se poser est de savoir comment câbler l'Arduino au capteur qui nous intéresse ?
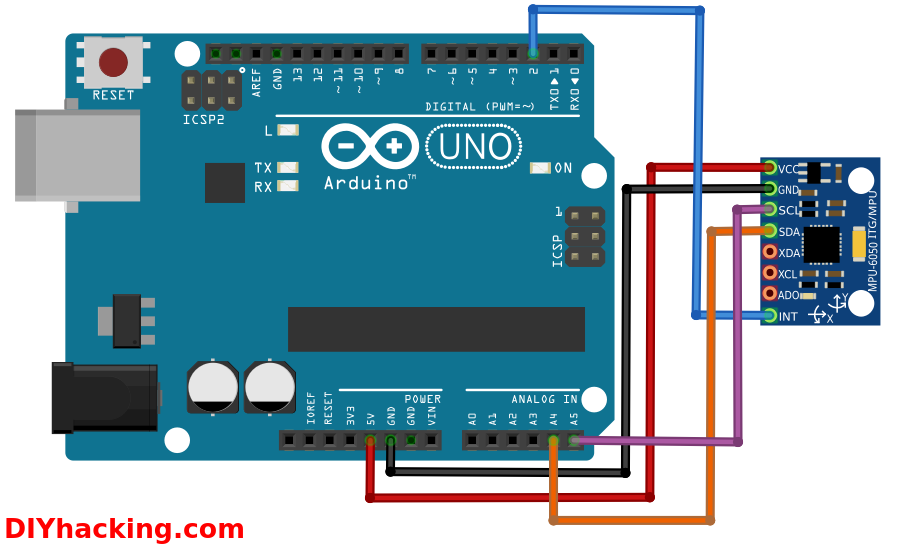
Câblage
Le câblage d'un Arduino UNO avec le GY-521 se trouve ICI. On ne reproduira donc pas ce schéma.
{kind=link}
Exercice 1
Nous allons commencer par le programme tout simple :
// MPU-6050 Short Example Sketch
// By Arduino User JohnChi
// August 17, 2014
// Public Domain
#include<Wire.h>
const int MPU=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,6,true); // request a total of 6 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.println(AcZ);
delay(333);
}
Essayez ce programme sur la liaison série.
La documentation du MPU 6050 dit que la valeur en g de l'accélération se trouve en divisant par 16384 (voir page 13). Êtes-vous d'accord avec la documentation ? Préciser votre méthode pour répondre à la question.
Exercice 2
Modifier ce programme pour sortir la direction verticale.
Voici schématiquement ICI sur Internet les calculs que l'on a à faire
{kind=link}
Partie Processing
On désire réaliser avec Processing une visualisation des données de l'exercice 2 précédent.
Exercice 3
Essayez de vous convaincre que lorsque l'accéléromètre est immobile la direction donnée est correcte (quelle que soit cette direction). Comment faites-vous ?
Utiliser le gyroscope seul pour trouver l'attitude
Nous espérons montrer dans cette section que le gyromètre est un capteur rapide mais qu'il possède un inconvénient, c'est qu'il dérive !
Nous allons aussi garder la partie Processing de la section précédente puisque la représentation du problème graphique est la même.
Un programme Arduino pour commencer
On donne :
// MPU-6050 Short Example Sketch
// By Arduino User JohnChi
// August 17, 2014
// Public Domain
#include<Wire.h>
const int MPU=0x68; // I2C address of the MPU-6050
int16_t GyX,GyY,GyZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU);
Wire.write(0x43); // starting with register 0x43 (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,6,true); // request a total of 14 registers
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
delay(333);
}
Exercice 4
Montrer que ce programme fonctionne.
ATTENTION un gyroscope est sensible à la vitesse de rotation (et non pas à l'angle) !!!
Aussi sur Internet
- Le GY-521 architecturé autour d'un MPU 6050 peut être trouvé pour 3€25 chez Amazon
- MPU-6050 Accelerometer + Gyro page qui contient un programme d'exemple.
- gyroscope et accéléromètre dans une puce
- Tilt Sensing Using Linear Accelerometers
- The Balance Filter